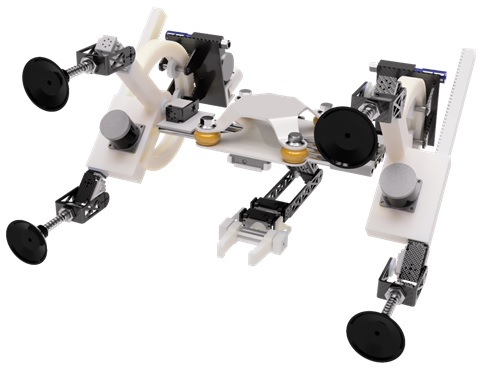
LANDrone
Developing robotic tools for adding non-planar surface landing capability to UAVs
Unmanned Aerial Vehicles (UAVs) have been taking an important place in daily life with several different usage purposes, e.g., mapping, surveillance, inspection, and many others. One of the widely used areas of UAVs is visual inspection since they can gather information from areas beyond human-reach or from environments hostile to humans. Their usage for the inspection
purpose is mostly limited to non-contact type sensors such as optical cameras and/or laser sensors. In this project, we propose an autonomous distributed cooperative control framework based on machine learning and a new interaction algorithm. We will develop a new method for accurately estimating
surface information and characteristics of an environment through the control of multiple robot
probes that dynamically interact with an unknown environment. Also, complete development of a
compact robotic mechanism with a robotic arm to allow UAVs to land on any shape of surfaces
and to collect data from surfaces using not only non-contact type but also contact-type sensors is
aimed at this project. This mechanism is intended to be light-weight, modular, expandable, selfbalanced, attachable to most of the existing UAVs. Such system will make UAVs to be more
powerful and useful for different applications such as Search and Rescue (of buried survivors due
to natural disasters or accidents at work), mine search and clean, detailed inspection of any type of
surfaces such as solar panel, aircraft, and similar others.
LANDrone: Huang, T., Elibol, A. & Chong, N.Y. Enabling landings on irregular surfaces for unmanned aerial vehicles via a novel robotic landing gear. Intel Serv Robotics 15, 231–243 (2022). LANDrone received funding from the Asian Office of Aerospace Research and Development (AOARD), which is a field office of the U.S. Air Force Office of Scientific Research (AFOSR).
Optical Mapping
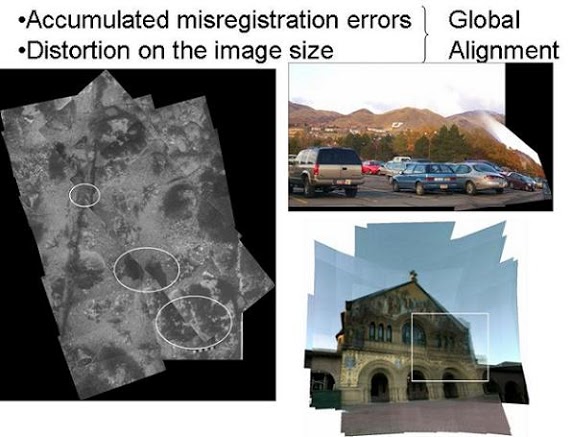
Global Alignment and Topology Estimation
Attenuation and scattering make image registration difficult and errors in image registration cause misalignment when images are mapped onto a mosaic (e.g. global) frame. Global projection of images (global or absolute homography) can be calculated by multiplying successively homographies between time consecutive images. Since homographies have some errors due to positions of correspondences and estimation method and so on, calculating global homographies from the time consecutive ones, accumulating, makes the error bigger in the form of misalignment and distortions on the mosaic, especially in the last part of the mosaic. To deal with this problem, global alignment methods are needed.In lack of other sensor data, the motion between time consecutive images is relevant information in order to estimate the topology of a complete sequence and to find the non-time consecutive overlapping images that provide useful information for global alignment. Although local alignment between images might be good, global alignment is still needed due to error propagation. Especially the errors on the estimated motion have to be dealt with when the camera revisits an area that has been already visited. The aim of global alignment is to overcome cumulative error and build a seamless and well aligned mosaic.
Over the past decade, several image mosaicing methods have been proposed in robotic mapping and remote sensing applications. Owing to rapid developments on obtaining optical data from areas beyond human reach, there is high demand from different science fields for creating large-area image mosaics, often using images as the only source of information. One of the most important steps in the mosaicing process is the motion estimation between overlapping images to obtain the topology, the spatial relationships between images. We propose a generic framework for feature-based image mosaicing capable of obtaining the topology with a reduced number of matching attempts and to get the best possible trajectory estimation. Innovative aspects include the use of a fast image similarity criterion combined with a MST solution, to obtain a tentative topology and information theory principles to decide when to update trajectory estimation. Unlike previous approaches for large-area mosaicing, our framework is able to naturally deal with the cases where time consecutive images cannot be matched successfully, such as completely unordered sets. This characteristic also makes our approach robust to sensor failure.